

正在举办的2026世界移动通信大会(上海)上人声鼎沸,一场别开生面的“人形机器人点球大战”吸引海内外观众的目光。
记者在现场看到,8个(组)身形各异的机器人有的穿着球衣,有的全身涂满彩绘,依次进入球场展开两两对决,分别作为“射手”进攻以及作为“守门员”防守。
随着哨音响起,一个人形机器人稳稳地走到“点球点”,它左右踱步,前后观察,随后后退几步,起跑,加速,推射。“球进啦!”将赛场围得水泄不通的观众顿时鼓掌叫好。

6月24日,“人形机器人点球大战”在2026世界移动通信大会(上海)上举行。新华社记者 陈爱平 摄
不过,这些“射手”并不是“百发百中”。有的力度、方向不太准确,踢出的球滚向了站在场边的裁判;有的力度、角度都不错,但足球与球门柱还是“擦肩而过”;还有的“不小心”被球绊倒,缓缓爬起来“再接再厉”,让观众捏了一把汗。
整场“点球大战”模拟了足球世界杯小组赛、淘汰赛、半决赛、决赛等流程,耗时两天,最终进球多、失误少、重重过关的机器人获得冠军。25日完赛后,它在球场上做起展臂亮相、欢呼的姿势庆祝胜利。
据介绍,这些机器人的点球都由它们自主完成。从观察环境、分析决策到最后实施,精准射门对当下的具身智能机器人来说并不容易。
“参赛前,机器人学习了足球运动员踢球视频。团队还对运动员推射、抽射、捅射等进球姿态进行了模拟、重建与骨骼重定向,让机器人可以‘理解’并复刻人们踢球的动作。”此次参赛的中国移动具身智能产业创新中心产品经理王开乐告诉记者。
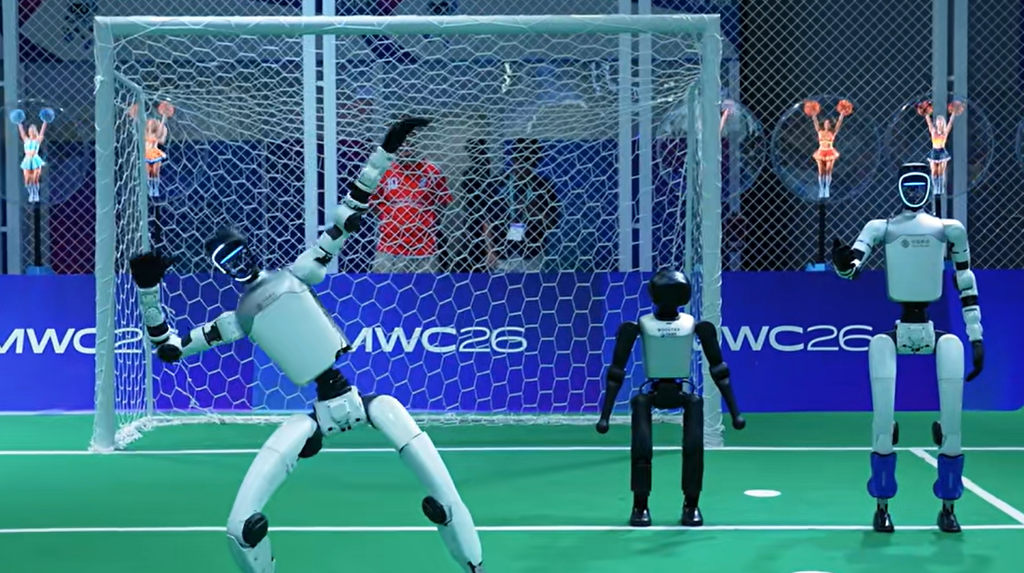
6月25日,人形机器人冠军队的“射手”(左)庆祝胜利。新华社记者 陈爱平 摄
他介绍,机器人上场后,还要独立完成观察环境、追踪目标足球、判断守门员站位、计算射门角度、全身协同发力、精准射门等“观察—决策—控制”闭环流程,而且每个闭环流程都要在约10毫秒时间内完成。因此,高精度的视频设备、三维动态感知模型、自适应轨迹预测与相机自运动补偿算法等装备和技术必不可少。
杭州千寻机器人有限公司负责人李蕾也认为,就完成单一的踢足球动作来说,机器人或许可以媲美专业运动员;但若将它放在一场足球比赛的环境里,就涉及无数从观察到决策的流程,这对具身智能机器人来说的确是很大的挑战。
全球移动通信系统协会(GSMA)大中华区技术总经理刘鸿介绍,希望通过足球运动测试人形机器人是否能“为我们的物理世界很好地建立模型”。这样的技术需要大量的算力支持,需要高性能、快速、稳定的网络,将机器人采集到的各种信息上传到“云端”并做出决策。
据悉,6月24日至26日举办的2026世界移动通信大会(上海)有超过400家展商、赞助商和行业合作伙伴参与。
“如今具身智能机器人已在博物馆、展厅和公共服务中心等场景实现小规模落地。”王开乐展望,随着“让人形机器人会踢足球”的底层技术的发展和迭代,未来具身智能机器人有望习得更多技能,从而实现规模化落地,走进千家万户。(记者陈爱平)
主办单位:《城市建设》杂志社有限公司
违法和不良信息举报电话:(010)63257595
投诉举报邮箱:qzlx@zgcsjs.org.cn
 PC版本
PC版本